您现在的位置是:首页 > 教育 >正文
麻省理工学院设计自主Roboats可以相互锁定并清洁垃圾
发布时间:2021-08-24 09:06:58来源:
导读阿姆斯特丹是一个运河纵横交错的城市,这些水道中的垃圾是一个大问题。运河在缓解附近道路的拥堵方面也未得到充分利用。为了解决这个问题,
阿姆斯特丹是一个运河纵横交错的城市,这些水道中的垃圾是一个大问题。运河在缓解附近道路的拥堵方面也未得到充分利用。为了解决这个问题,阿姆斯特丹的愿景是建立一支自动驾驶船队,它们可以在运河中航行,不仅可以捡拾垃圾,还可以运送货物和人员。麻省理工学院的研究人员正在努力使阿姆斯特丹的愿景成为现实。
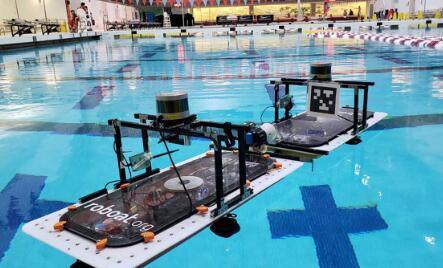
麻省理工学院设计了一支被称为 Roboats 的机器人船队,它们可以相互瞄准和扣紧。如果他们第一次未能扣紧,Roboats 将继续尝试。Roboats 是具有矩形船体的自主船,配备有传感器、推进器、微控制器、GPS 模块、摄像头和其他硬件。
该项目有几个目标,其中之一是提供水路按需运输。该项目的另一个目标是让 Roboats 成为弹出式地点,能够根据需要将它们结合在一起形成人行天桥、表演舞台或食品市场。当需要结束时,Roboats 可以拆卸并继续前进。
Roboat 装置还可以用作传感器来捕获有关城市基础设施、空气和水质以及其他数据的数据。自主船有闩锁机构,包括正面、背面和侧面的球窝。球窝是一个漏斗,里面有一个激光束,可以检测球何时进入接收器,激活三个靠近并捕获球的臂。然后船向两艘 Roboat 发送信号,让他们知道连接已完成。
麻省理工学院的研究人员目前正在设计的 Roboat 装置大约是现有装置的四倍,在水上更稳定。该团队还在努力改进漏斗系统,以便在拖曳平台或其他 Roboats 通过运河时让 Roboats 更好地控制。
标签:
猜你喜欢
最新文章
- 172男生正常体重(172体重多少合适)
- 2022年02月22日7月10日来天猫小米旗舰店小米8放量抢购
- 1.8床和1.5床长和宽是多少(1.5米床和1.8米床区别)
- 2022重庆社保个人缴费基数是多少 2022养老保险缴费基数是怎么来的
- 1公里走路需要多少分钟(1.8公里走路要多久)
- 聚酯纤维100%的衣服怎么洗(100%聚酯纤维怎么洗)
- 广东省过渡性养老金是在哪一年截止 2022广州市过渡性养老金怎么计算的
- 2022年02月22日积灰问题难消除FindX或成“吸尘机”
- little和less有什么区别(less和little的区别)
- 鞍钢职工养老保险查询 2022鞍山养老保险查询途径有哪些
- ow是哪国的(macow 是哪个国家)
- 奥迪A4L入门版将于9月上市 搭载1.4T发动机
- 1月15日魅族16真机再曝光18:9屏幕+超窄边框
- new bunren是正品吗(new caledonia是哪个国家)
- 黑龙江省鸡西市养老保险今年交多少? 2022鸡西养老保险查询指南
- pizza纸盒能进微波炉吗(pizza纸盒能进微波炉吗)
- 2021成都车展博物馆:瑞丰S2S3智能驱动系列
- 井矿盐跟海盐哪种好(井矿盐和海盐区别)
- 2022年02月22日小米&美图重磅联姻网友火速放出渲染图
- 丹霞石有什么特点(丹霞石是什么石头)
- 两河流域代表的是什么文明(两河流域文明是指什么)
- 已有27队晋级世界杯
- 世预赛巴西与玻利维亚双方的首发阵容
- 德国客场1比1战平荷兰